
Step 1: Understand the Core Concepts of Reinforcement Learning
Reinforcement learning revolves around an agent interacting with an environment to learn a policy that maximizes a reward. Here’s a breakdown of the key components:
- Agent: The decision-maker (e.g., a robot, a game player).
- Environment: The world the agent interacts with (e.g., a game, a simulation).
- State (s): A representation of the environment at a given time (e.g., the position of a player in a game).
- Action (a): The choices the agent can make (e.g., move left, jump).
- Reward (r): A scalar feedback signal from the environment after an action (e.g., +1 for a good move, -1 for a bad one).
- Policy (π): A strategy that maps states to actions (e.g., “if in state s, take action a”).
- Value Function (V): Estimates the expected cumulative reward starting from a state, following a policy.
- Q-Function (Q): Estimates the expected cumulative reward for taking a specific action in a state and following a policy thereafter.
The goal of RL is to find an optimal policy (π*) that maximizes the expected cumulative reward over time, often discounted by a factor γ (gamma) to prioritize immediate rewards over distant ones.
Step 2: Grasp the Mathematical Framework
Reinforcement learning is often modeled as a Markov Decision Process (MDP), defined by the tuple (S, A, P, R, γ):
- S: Set of states.
- A: Set of actions.
- P(s’|s, a): Transition probability of moving to state s’ from state s after taking action a.
- R(s, a, s’): Reward function for transitioning from s to s’ via action a.
- γ: Discount factor (0 ≤ γ < 1), balancing immediate vs. future rewards.
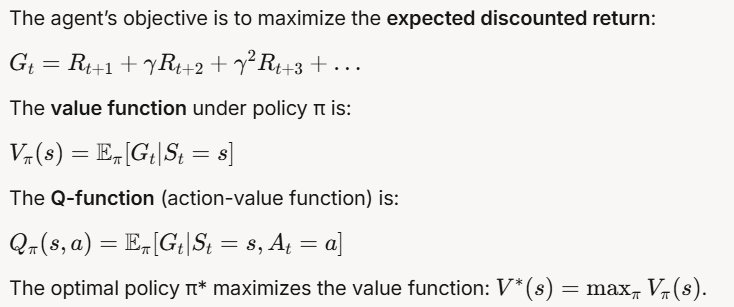
The agent’s objective is to maximize the expected discounted return:
Step 3: Choose an RL Algorithm
For this tutorial, we’ll focus on Q-Learning, a simple yet powerful model-free RL algorithm. Q-Learning is an off-policy algorithm, meaning it learns the optimal policy even if the agent doesn’t follow it during training. It updates the Q-values using the Bellman equation:

Where:
- α: Learning rate (how much to update Q-values).
- r: Immediate reward.
- γ: Discount factor.
- s’: Next state.
- a’: Next action.
Q-Learning uses an ε-greedy policy to balance exploration (trying new actions) and exploitation (choosing the best-known action):
- With probability ε, pick a random action.
- With probability (1-ε), pick the action with the highest Q-value.
Step 4: Set Up the Environment
We’ll use the OpenAI Gym library (now part of Gymnasium) to create a simple environment for our RL agent. The “FrozenLake-v1” environment is a good starting point. It’s a grid world where the agent must navigate from a start to a goal while avoiding holes.
Install Dependencies
First, install Gymnasium if you haven’t already:
pip install gymnasiumCreate the Environment
Here’s the setup in Python:
import gymnasium as gym
import numpy as np
# Create the FrozenLake environment
env = gym.make("FrozenLake-v1", is_slippery=False)
env.reset()
# Get the state and action space sizes
n_states = env.observation_space.n # 16 states in a 4x4 grid
n_actions = env.action_space.n # 4 actions (left, down, right, up)In FrozenLake:
- States: 16 positions on a 4×4 grid.
- Actions: 4 directions (0: left, 1: down, 2: right, 3: up).
- Rewards: +1 for reaching the goal, 0 otherwise.
- The agent starts at (0,0) and aims to reach the goal (3,3).
Step 5: Initialize the Q-Table
The Q-table stores the Q-values for each state-action pair. Initialize it with zeros:
# Initialize Q-table with zeros
Q = np.zeros((n_states, n_actions))
# Set hyperparameters
alpha = 0.1 # Learning rate
gamma = 0.99 # Discount factor
epsilon = 0.1 # Exploration rate
n_episodes = 1000 # Number of training episodes
max_steps = 100 # Max steps per episodeStep 6: Implement the Q-Learning Algorithm
Now, let’s write the training loop for Q-Learning. The agent will:
- Choose an action using the ε-greedy policy.
- Take the action, observe the reward and next state.
- Update the Q-table using the Bellman equation.
- Repeat until the episode ends (goal reached or max steps exceeded).
# Training loop
for episode in range(n_episodes):
state, _ = env.reset() # Reset environment, get initial state
done = False
step = 0
while not done and step < max_steps:
# Choose action (ε-greedy)
if np.random.uniform(0, 1) < epsilon:
action = env.action_space.sample() # Explore: random action
else:
action = np.argmax(Q[state, :]) # Exploit: best action
# Take action, observe reward and next state
next_state, reward, done, truncated, _ = env.step(action)
# Update Q-table
Q[state, action] = Q[state, action] + alpha * (
reward + gamma * np.max(Q[next_state, :]) - Q[state, action]
)
# Move to the next state
state = next_state
step += 1
# Optional: Decay epsilon to reduce exploration over time
epsilon = max(0.01, epsilon * 0.995)
print("Training completed!")Step 7: Test the Learned Policy
After training, test the agent by following the learned policy (always choosing the action with the highest Q-value):
# Test the agent
state, _ = env.reset()
done = False
total_reward = 0
while not done:
action = np.argmax(Q[state, :]) # Choose the best action
next_state, reward, done, truncated, _ = env.step(action)
total_reward += reward
state = next_state
env.render() # Visualize the agent's moves (if render mode is enabled)
print(f"Total reward: {total_reward}")
env.close()In FrozenLake, a total reward of 1.0 means the agent successfully reached the goal.
Step 8: Analyze and Improve
- Results: After 1000 episodes, the agent should learn a policy that reliably reaches the goal. If not, try adjusting hyperparameters (e.g., increase
n_episodes, tweakalphaorgamma). - Exploration vs. Exploitation: If the agent gets stuck, increase
epsilonto encourage more exploration. If it takes too long to converge, reduceepsilonor decay it faster. - Environment Complexity: FrozenLake is simple. For more complex environments (e.g., CartPole-v1), you might need advanced algorithms like Deep Q-Learning (DQN), which uses neural networks to approximate the Q-function.
Step 9: Explore Advanced RL Techniques
Once you’re comfortable with Q-Learning, consider these next steps:
- Deep Q-Learning (DQN): Uses a neural network to handle large state spaces (e.g., for Atari games).
- Policy Gradient Methods: Directly optimize the policy (e.g., REINFORCE, PPO).
- Actor-Critic Methods: Combine value-based and policy-based methods for better stability (e.g., A3C, SAC).
- Multi-Agent RL: Train multiple agents to cooperate or compete (e.g., in games like soccer).
Step 10: Apply RL to Real-World Problems
Reinforcement learning has applications in:
- Robotics: Teaching robots to walk or grasp objects.
- Gaming: Training AI to play games like chess or Go.
- Autonomous Driving: Optimizing navigation and decision-making.
- Finance: Portfolio management and trading strategies.
Start with a small project, like training an RL agent to play a simple game, and gradually tackle more complex challenges.
This tutorial provides a foundational understanding of reinforcement learning through Q-Learning. By experimenting with the code and exploring advanced techniques, you’ll be well on your way to mastering RL and applying it to real-world problems. Happy learning!
Related Posts

The Complete DevOps Handbook: From Code to Deployment
Introduction: The DevOps Revolution In today's fast-paced digital landscape, the…
AIRPLANE EMERGENCY PROCEDURES MANUAL
Table of Contents General Emergency Principles Engine Failure Procedures Fire…
How to Pass the Cisco Certified Internetwork Expert (CCIE) Certification
The CCIE certification represents the pinnacle of networking expertise and…